


-

CANoe
A comprehensive suite of distributed network, bus, and ECU development, testing, and analysis tools

CANoe is a comprehensive software tool used for developing, testing, and analyzing individual ECUs and the entire ECU network. It provides support for network designers, development and testing engineers throughout the entire development process, from planning, design to system level testing. The various variants and functions of CANoe can meet the needs of different project types and environments with higher real-time requirements. You can also operate CANoe as an HIL (Hardware in the Loop) system. The universal features and configuration options of CANoe have been widely used by global automotive OEMs, suppliers, as well as users in fields such as aviation electronics, industrial control, and the Internet of Things (IoT). CANoe can meet the application requirements at different stages of product development and validation.

-
Test ECU and the entire network
-
Analyze network communication
-
Diagnostic support
-
Simulation of functions and communication processes
-
Rich and flexible incentive methods
Main Benefits
-
CANoe "one-stop" implementation of all development and testing tasks for ECU
-
CANoe fully supports various scenarios of simulating, testing ECU, and diagnosing
-
CANoe friendly graphical interface and text evaluation results
-
Support for avionics systems and networks
-
CANoe supports hardware in the loop (HIL), software in the loop (SIL), and model in the loop (MIL) testing
-
Provide multiple CANoe derivative versions to meet the needs of different specific scenarios
-
Provide intelligent automated testing methods
-
Identify and correct error situations early in the development process
-
Provide support for Internet of Things (IoT) applications
-
Support security management
-
Provide rich automotive bus, protocol, measurement, diagnostic, and avionics bus support plugins
Main Function
-
Test
-
Communication Analysis
-
Diagnosis
-
Simulation
-
Motivate
-
IoT Services
-
 Test
Test CANoe represents the most advanced ECU and network testing environment. It is also the most ideal testing tool for the entire system and effective ECU testing. CANoe provides unparalleled solutions for you in the following areas:
• ECU testing
• Module testing
• Integration testing
• Compliance testing
• Regression testing
• ECU prototype testing
CANoe provides a wide range of open interfaces to support various adaptations to your testing environment:
• Integrated hardware for incentivizing, measuring, and injecting errors
• VT System, Digital and analog I/O, automatic measuring equipment, controllable power supply
• Interface simulation and testing model: MATLAB/Simulink model
• Control the testing system from a third-party: through program calls and script calls
• Integrated into higher-level test controllers: via CANoe COM servers, such as Python or NET
• Link to external software tools, such as a requirement management system to meet traceability requirements
-
Communication Analysis
CANoe users can analyze the multi bus communication between ECU and the entire system on their desktop and vehicle, providing rich intelligent windows to support their analysis work:
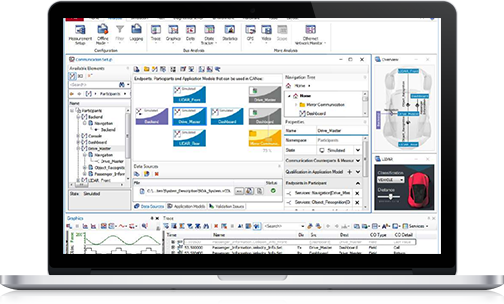
• Tracking window: lists all bus activities, such as messages, error frames, and remote frames. Display individual signals in each message - even during the measurement process
• Graphic window: online display of the variation of physical signals (such as speed and temperature) transmitted in the message over time
• Statistics window: used to display useful network and node statistics information, such as node and frame level bus load, burst counters/duration, frame and error counters/rates, controller status
• Data Window: Display selected data in numerical and bar chart form
• Scope window: Used for offline display of bit level measurements recorded using Option. Scope
• Interactive generator: used for bus excitation and easy transmission of modified signals
• Signal generator: used to generate signal waveforms (sine waves, slopes, pulses, value lists, etc.)
• Recording/playback: for recording and subsequent measurement analysis or playback
• Triggering and filtering: to make specific responses to bus events and reduce the amount of data displayed or recorded
• Write window: a write window for system messages and user specific outputs of CAPL programs
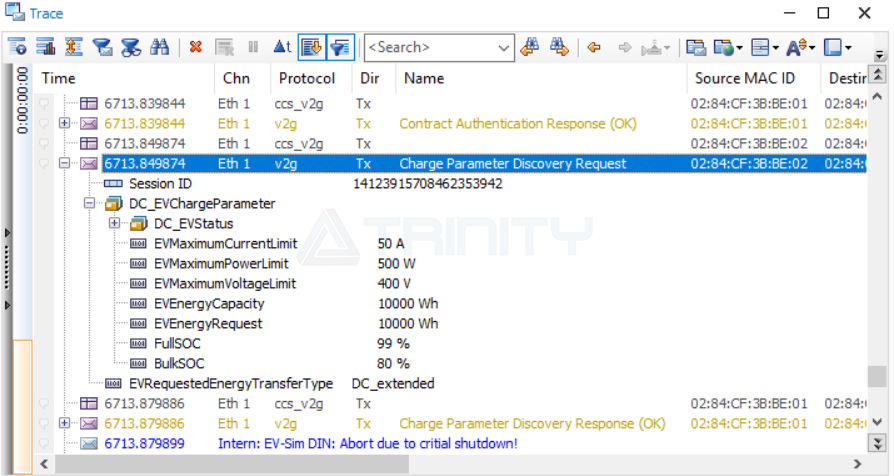
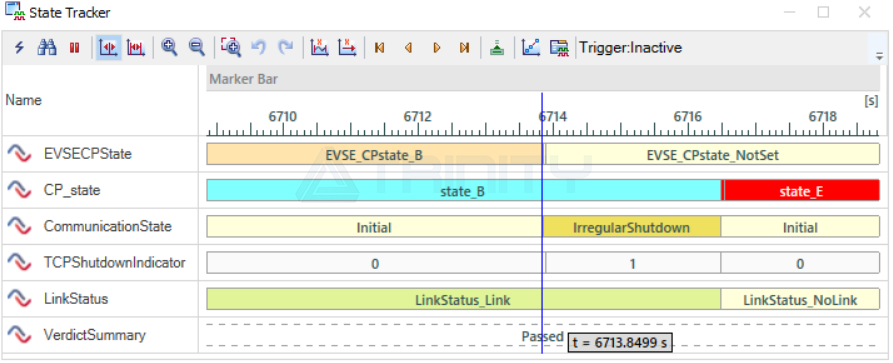
• Status tracker: used to display status and bit signals
-
Diagnosis
The diagnostic feature set provided by CANoe can help you analyze diagnostic communication through KWP2000 and UDS standards. CANoe can be used as a diagnostic tester or simulate ECU diagnosis. Parameterize it through ODX or CANdelaStudio description files. In addition, CANoe integrates a complete OBD-II tester.
With CANoe. DiVa, you can automatically test the diagnostic software in the ECU. Reproducible test cases are generated based on ECU diagnostic instructions in CANdela or ODX format, and CANoe automatically executes these test cases and generates conclusive test reports.
With CANoe, you can also achieve diagnostic simulation of ECU. In addition, the "testing feature set" provided by CANoe allows you to perform automated testing programmed in CAPL and XML NET or with the help of vTESTstudio. CANoe can also automatically generate test reports in XML and HTML formats according to requirements.
-
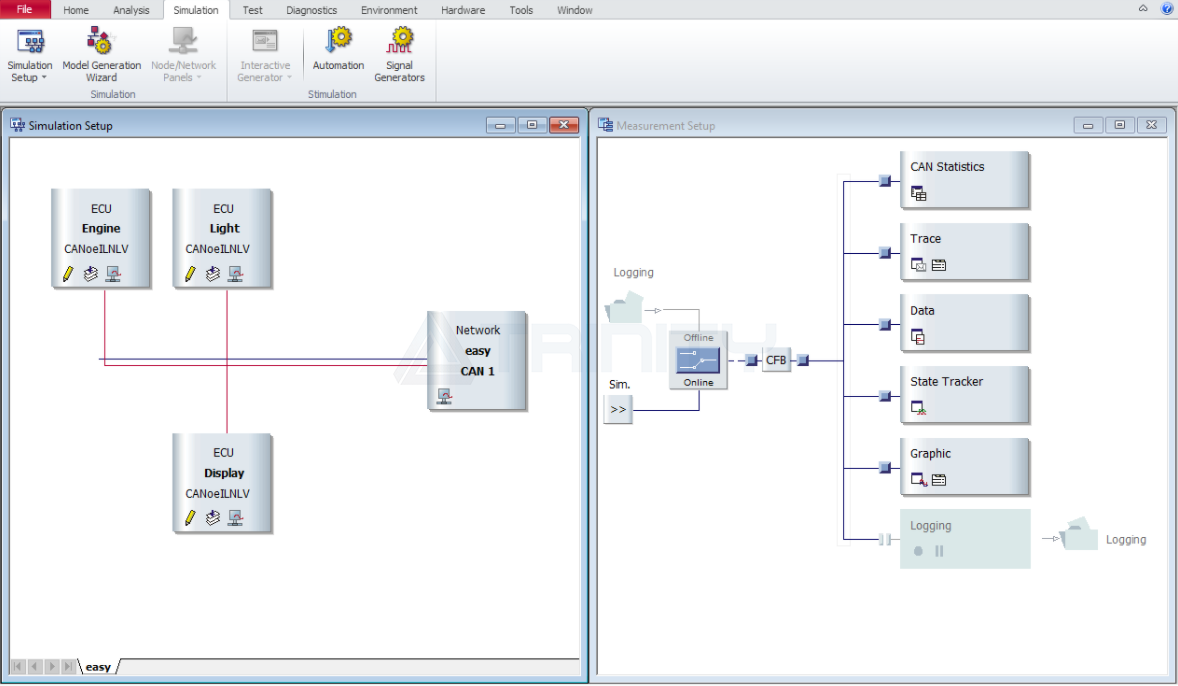
Simulation
Users can use CANoe's simulation function to test and analyze System Under Test (SUT), which can be hardware or software. By transferring actual components to a simulation environment under laboratory conditions, SUT can utilize CANoe to operate in customized, controlled, and most importantly, reproducible situations. This allows for risk-free analysis of limits and special situations. This residual bus simulation function can be used in all development stages to achieve:
• Effectively test the entire network and functionality using residual bus simulation
• Flexibly expand residual bus simulation through models and functionalities
• Synchronous simulation of multiple communication topologies
• Multiple intervention options during the simulation process
• Open and flexible interface to connect tools
• Test and simulation settings that can be reused in all development stages
• Create a specific residual bus simulation using a generator
-
Motivate
By using CANoe's incentive function, you can intentionally send individual messages or signals as needed, easily and quickly triggering reactions from ECUs in the network. The response of ECU will to some extent reflect the correctness of its function. CANoe provides many methods to incentivize ECU in the network, including various aspects from pre-defined user interfaces to different programming options:
• CAPL or is used to set signal and variable values NET program
• Visual Sequencer makes it easy to create command sequences
• Signal generator and signal playback, used to generate signal responses (sine wave, ramp, pulse, value list, etc.)
• Interactive Generator and Frame Panel, used to excite the bus and conveniently send modified signals
• Panel used by users to create custom graphical user interfaces
-
IoT Services
CANoe provides IoT device connectivity services, which is a free CANoe/CANoe4SW extension that allows you to easily connect to the System Under Test (SUT) through the backend or local proxy. Your SUT can be a real device or pure software, such as a system in a virtual environment. At present, MQTT protocol is mainly supported, and more protocols are planned to be supported in the future.
• Used for functional testing of software or devices
• Use familiar features such as analysis windows, automated testing, or integration with other models to provide a system environment
• No special IT strategy is required as the connection is established through web sockets or HTTPS
Supported Environment
The bus networks, protocols, and database files supported by CANoe
Bus network: | CAN/CAN FD、LIN、FlexRay、Ethernet、WLAN、J1708、AFDX、ARINC 429 etc. |
High level agreement: | TCP/IP、AVB、CANopen、J1939、ISO 11783、J1587、EtherCAT、SOME/IP、MQTT etc. |
Intelligent Sensor Protocol: | PSI5、SENT、SPI、UART(RS232、RS485、RS422、LVDS)、I2C etc. |
Charging communication protocol: | DIN 70121、ISO/IEC 15118、GB/T 27930、CHAdeMO etc. |
V2X protocol: | GB/T 31024.3、T/CSAE 53-2017、SAE J2735、IEEE 1609、ETSI ITS 102、ETSI EN 302 etc. |
Diagnostic protocol: | ISO 9141、ISO 14229、ISO 14230、ISO 15031-6(OBD-II)、SAE J1939-73 etc. |
Communication/Diagnostic/Calibration Database: | DBC、ARXML、A2L 、FIBEX、LDF、CDD、ODX etc. |
Optional plugins supported by CANoe
Bus plugin: | LIN、FlexRay、Ethernet、MOST、Car2X |
High level application protocol plugin: | Smart Charging、J1939、J1587、CANopen、ISO 11783、For EtherCAT® |
Measurement and Diagnostic Plugin: | AMD/XCP、DiVa、Scope、SENSOR |
Aerial linker: | A429、AFDX |
Related
